Разработка ученых ТУСУРа поможет видеть в условиях тумана и задымления

Ученые ТУСУРа получили патент на способ формирования изображения карты дальностей до наблюдаемых объектов в рассеивающих средах.
Коллектив ученых кафедры телевидения и управления (ТУ) получил патент на способ формирования изображения карты дальностей до наблюдаемых объектов в рассеивающих средах.
«Сегодня существует большое количество приборов для построения карт глубин для разных целей. Под картами глубин в данном случае следует понимать изображение, каждый элемент (пиксель) которого несет информацию о дальности до наблюдаемого объекта. Большинство из существующих приборов для построения карт глубин способны работать только в условиях хорошей видимости (прозрачности среды). Так же существуют системы, которые упрощают видимость в тумане, но при этом они либо вообще не способны строить карты глубин, либо строят их с низкой детализацией. Особенность нашей системы заключается в том, что она позволяет строить карту глубин с высокой детализацией и скоростью, причем делает это в условиях плохой видимости, под плохой видимостью понимаются такие условия как: туман, задымление, условия видения под водой», - отмечает один из авторов патента, доцент кафедры ТУ, заведующий научно-исследовательской лабораторией «Телевизионная автоматика» Вячеслав Капустин.
Система, созданная учеными ТУСУРа, может стать «глазами» беспилотных систем, позволяя им ориентироваться в пространстве в условиях плохой видимости. Например, это может быть востребовано МЧС при тушении различных пожаров, чтобы обезопасить людей. Также после определенной модификации она может устанавливаться на пилотируемый транспорт в качестве системы помощи водителю в условиях тумана и других сложных условиях с недостаточной видимостью.
Работа над этой тематикой началась в университете несколько лет назад в рамках гранта РНФ. В основе – принцип активно-импульсного наблюдения.
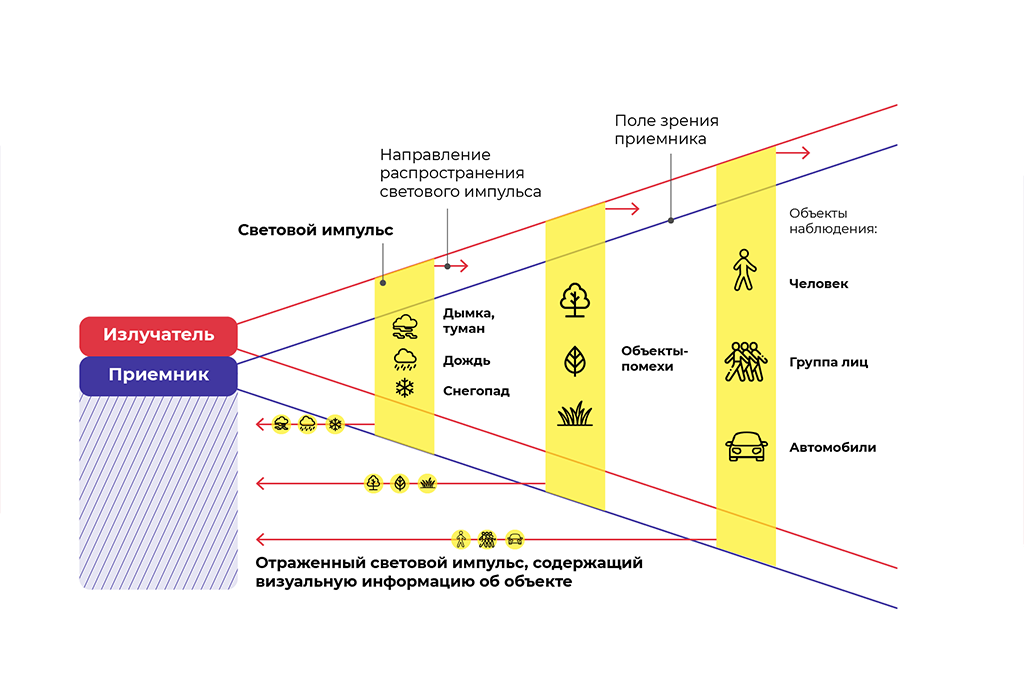
«Главная проблема в сложных условиях видимости (сложных метеорологических условиях) заключается в том, что при наблюдении объектов в таких условиях, возникает помеха обратного рассеяния, которая заслоняет собой объекты и значительно ограничивает дальность их обнаружения. Помеха обратного рассеяния это грубо говоря фотоны, отразившиеся от среды в направлении наблюдателя. Наша система с импульсным источником освещения работающем в невидимом глазу диапазоне длин волн излучает мощные короткие вспышки (длительностью в 30 наносекунд). После этого через задержку стробирования фотоприемника принимается отраженный оптический импульс. Благодаря этому принципу система «выбирает», откуда мы будем видеть отраженные фотоны, а откуда проигнорируем, «обходя» таким образом помеху обратного рассеяния. Если специальным образом модулировать приемник либо излучатель, например, если сделать линейно нарастающую мощность излучения, либо чувствительность фотоприемника, мы можем получить зависимость «яркость-расстояние», и затем благодаря калибровке и привязке полученных значений к дальности мы получаем карту глубин, - рассказывает Вячеслав Капустин. - В сложных же условиях видения, линейность зависимости «яркость-расстояние» нарушается тем сильнее, чем ниже прозрачность среды. Нарушается она в следствии воздействия остаточной помехи обратного рассеяния. В нашем патенте мы описываем способы подавления влияния остаточной помехи обратного рассеяния на зависимость «яркость-расстояние» что бы точность построения карты глубин была сопоставимой с хорошими условиями видимости».
С применением прибора, созданного учеными университета, было проведено несколько экспериментов в аэрозольной камере Института оптики атмосферы им. В.Е. Зуева СО РАН, которая позволяет создавать условия сложной видимости (эффект тумана разной плотности, задымленность и т.д.). Лабораторные испытания подтвердили эффективность применяемого метода.
«Для создания одного кадра, содержащего карту глубин нам необходимо сделать 2 кадра с разными характеристиками. Для этого на данном этапе наша система работает с частотой 50 кадров в секунду (25 кадров для построения карты глубин). Этой частоты достаточно, чтобы глаз не замечал смену кадров, - рассказывает ученый.
Теоретически этого достаточно, чтобы вовремя обнаружить препятствие при движении в условиях плохой видимости на скорости до 40км/ч. В планах – подтвердить это предположение экспериментально».
Кроме того, в планах разработчиков, адаптировать систему с помощью программного обеспечения так, чтобы использовать ее как 3D-сканер высокой точности.